La bouée de régate radio-commandée pour la VRC…
Le sujet n’est pas nouveau et la ffvoile avait choisi un système pour les jeux olympiques – mais pas vraiment adapté à nos bateaux en VRC.
Dans un article précédent sur le site de la classe M, on a présenté la bouée radio-commandée de Manu à Vannes, une bouée qui mouille son lest lorsqu’elle est en place, puis le remonte pour récupération. Manu poursuit ses dévelopements avec une bouée GPS à un seul moteur et un gouvernail que l’on présentera quand il l’aura mise en service.
De leur côté, Alain & Philippe du club de Choisy (CNCR) ont développé un système très complet de bouées de régates pilotées par GPS – depuis un téléphone, le mouilleur pilote les bouées et une fonction lie les bouées ensemble permettant de déplacer la bouée au vent et que le parcours tout entier se reconfigure. Le système est au point et il est utilisé pour les régates à Choisy en M ou en DF95 et pour les entraînements sur le lac de la Sourderie près de Saint Quentin en Yvelines.

Tout cela montre qu’il est maintenant possible de monter des bouées de régate équipées de GPS pour faciliter le mouillage des parcours car on a plus besoin de mettre un bateau à l’eau pour mouiller les bouées et la récupération est facilitée également.
L’objet de cet article est de décrire comment on a créé un prototype en peu de temps pour disposer de quelques bouées pour nos entraînements au CVSQ – car sur ce plan d’eau, on n’a pas la possibilité de mouiller des parcours de façon permanente comme sur certains plan d’eau.
L’idée est de s’inspirer des drones et d’adapter leur système à la configuration d’une telle bouée. Car un drone, sait aller à une position définie, rester en station, revenir au point de départ, etc…
Le logiciel ARDUPILOT permet de configurer un flight controleur (le cerveau de notre bouée) en mode Rover (c’est à dire un véhicule automobile) – mais aussi de le configurer comme un char d’assaut à chenilles – ce faisant on va pouvoir équiper notre bouée de deux moteurs légèrement écartés et diriger la bouée vers sa position cible.
Le flight controleur a une fonction qui permet d’asservir la bouée à la position choisie par le mouilleur.
Pour l’électronique, on va donc avoir besoin :
- d’un controleur de vol (on a choisi un Mini PIX car toutes les connexions se font sans soudures)
- d’un GPS
- d’un circuit pour distribuer le courant qui est fourni par une batterie 2S ou 3S
- de deux circuits ESC bidirectionnels
- de deux moteurs étanche brushless
- d’un récepteur (on a privilégié la sortie S-Bus par exemple sur le récepteur flysky fS- IA6b)


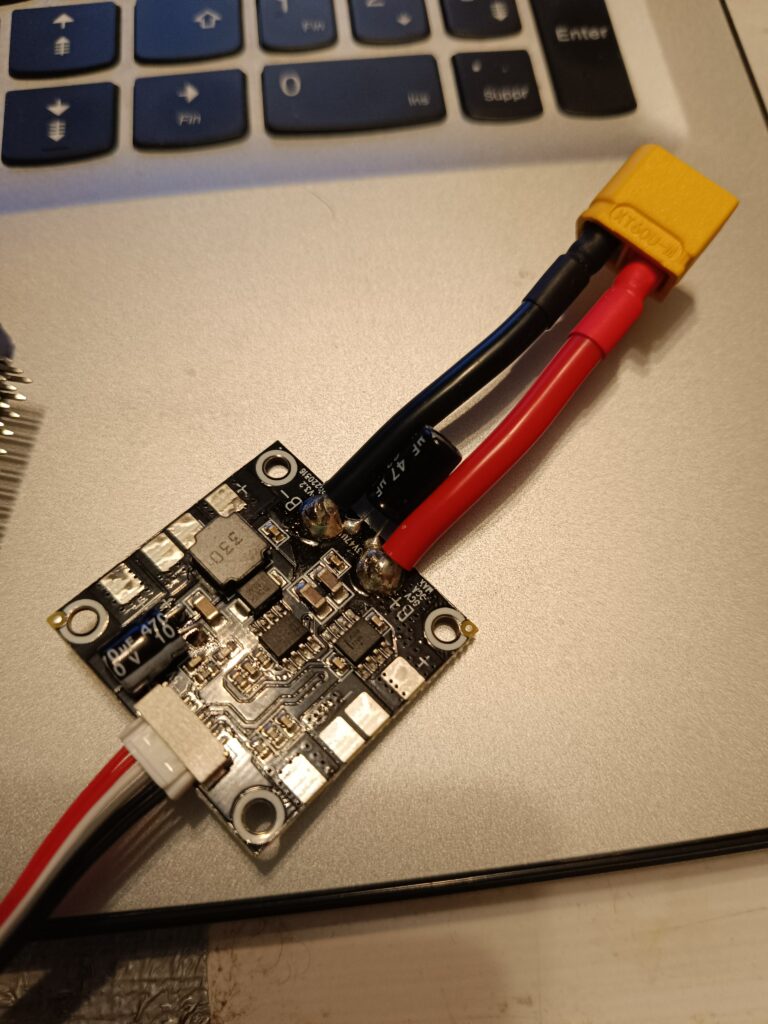
Les raccordements sont faciles à faire (branchement de petites prises jst) à l’exception du raccordement de l’alimentation des esc qui nécessitent deux soudures pour chacun des esc.

La configuration de l’électronique se fait à l’aide du configurateur ARDUPILOT qui va permettre de choisir le mode Rover, de paramétrer le fonctionnement à deux moteurs (sans gouvernail) et de choisir le comportement de la bouée.
La bouée en elle-même est constituée d’un disque de polystyrene de 25 cms d’épaisseur et de 50 cms de diamètre. Un boîtier d’électricien étanche va permettre de loger l’électronique dans un compartiment étanche. Un saladier en plastique de couleur, chapeaute la bouée pour la rendre plus visible de loin.
Les deux moteurs électriques sont fixés sous la bouée.
Utilisation : On a cherché la simplicité avant tout…
Etape 1 : On met en marche la bouée en la branchant à sa batterie. Elle s’initialise en quelques secondes, et le gps commence à chercher sa position – la première fois cela peut prendre quelques minutes, ensuite celà prend une trentaine de secondes.
Etape 2 : On arme la bouée, cela ne peut se faire que sous deux conditions. le gps a un fix et les joysticks sont tous les deux au milieu. Cet étape va permettre à la bouée de mémoriser sa position de retour à la base.
Etape 3 : on pilote avec la radiocommande la bouée pour l’amener à la position souhaitée la bouée est en mode manuel.
Etape 4 : on passe la bouée en mode automatique, elle maintient alors sa position jusqu’à ce que l’on modifie son mode, soit retour en mode manuel pour la repositionner, soit mode retour à la base pour la récupérer.
Etape 5 : On passe la bouée en mode retour à la base pour la récupérer.
On peut arreter la radio – dans ce cas la bouée reste à sa position jusqu’à ce qu’on rallume la radiocommande.

Pour créer le prototype, Laurent a fabriqué la base, Michel a assemblé le tout et Jean-Baptiste a imaginé la solution et mis au point l’électronique… une belle réalisation des « Amis des Flots », notre association de modèlisme dont les membres nous ont aidé pendant la réalisation.
Aucune programmation n’a été nécessaire, seuls l’assemblage des composants et le paramètrage du configurateur ARDUPILOT ont permis de réaliser notre prototype…
Au chapitre coûts, on a dépensé environ 200 euros pour le prototype, cela comprend l’électronique, les moteurs avec les esc, le boîtier étanche et les petites fournitures. La radio-commande et la batterie 2s ne sont pas incluses dans ces coûts (réutilisation de radio et batterie).
Pour les bouées suivantes, on espère ramener le coût unitaire vers les 100 euros – en choisissant un flight controleur moins chers, un gps sans boîtier, un circuit de puissance à souder, etc…
Si vous êtes intéressés à fabriquer votre bouée (ou vos bouées) n’hésitez pas à nous contacter.