Régler le nombre de tours de son Treuil KINGMAX…
KINGMAX fait des treuils que l’on peut utiliser sur son M. Le plus répandu est le SW22HV dont on peut paramétrer le nombre de tours grâce à une carte de programmation. La procédure est fastudieuse, mais c’est faisable. Les instructions sont détaillées sur le forumvoile là. (Note du 6 décembre 2024 : Le SW22HV a subi une modification de son chip interne et la procédure référencée ne fonctionne plus. La version 2 de ce servo doit être programmé avec une carte CP2102 – un article détaillé sera créé quand j’aurai pu programmer le SW22HV v2).
Dans l’article qui suit on va s’intéresseer à la façon de paramètrer les nouveaux treuils KINGMAX dont la qualité de fabrication, la puissance, le poids et le prix en font un très bon choix pour nos M et 10R.
La société KINGMAX hobby (http://www.kingmaxhobby.com/) produit et commercialise des servos et treuils étanches aux caractéristiques intéressantes et à des prix “canons”. Très belle qualité de fabrication. Par exemple les treuils sont livrés avec le tambour en alu à 25 dents et double gorge (25T).
Nombreux VRCistes connaissent le SW22HV (voir photo ci-dessous) qui donne d’excellents résultats en RG65, IOM, ou M.
Les servos réglables de nouvelle génération, objet de cet article, sont les suivants (hormis le SW6114MD) :

A – Composition des équipements pour procéder au paramètrage :
1) Servo KING MAX de type
Il faut bien sûr l’un des treuils suivants:
SW01CS (18kg)
SW02CS (28kg)
SW01BS (28kg)
SW02BS (37kg)
2) Une carte de programmation AZ SMART
Pour se la procurer, on peut la commander sur AliExpress par exemple
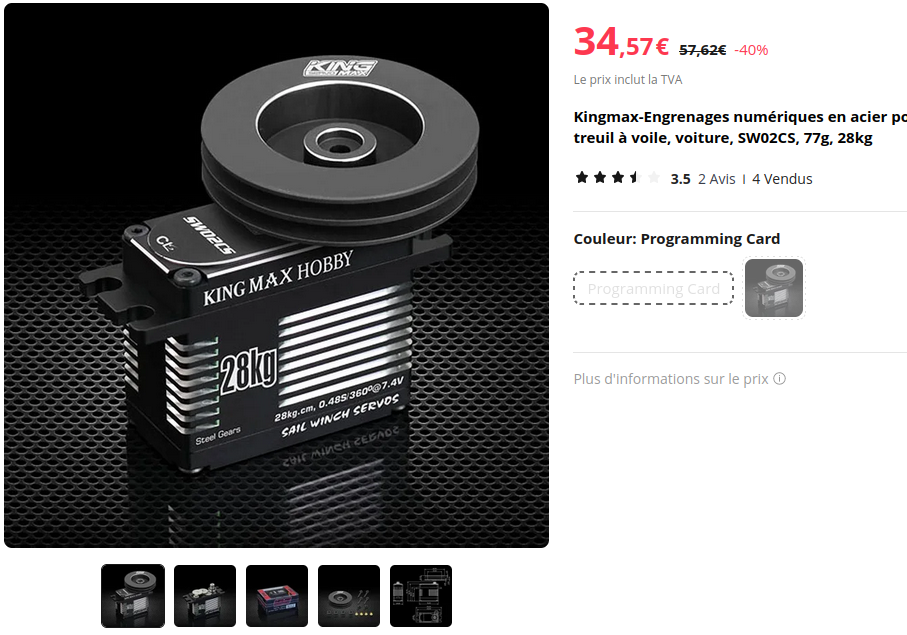
Choisir “Programmation Card” dont il n’y a pas de photo (je sais, c’est bizarre…).
3 ) Le logiciel pour PC Windows
Ce logiciel permet d’établir une connexion avec la carte de programmation et le servo. On peut charger la configuration du servo et la sauvegarder, la modifier et la charger dans le servo.
Le mode d’emploi a été créé en utilisant la version 1.11 du logiciel.
Fichier compressé à télécharger ici : Logiciel et documentation
4) Une batterie de 5 à 8 volts (LIFE, LIPO,…)
J’utilise une batterie de 6,6 volts. Une lipo 2S convient aussi.
5) un cable USB
Le cable doit avoir une prise USB « C » pour la carte de programmation et USB « A », « B » ou « C » selon le connecteur du PC.
B – Connexion des équipements
- Connecter le PC Windows à la carte de programmation au moyen du cable USB.
- Connecter le servo comme indiqué sur la photo en respectant la polarité.
- Connecter la batterie pour alimenter la carte et le servo en respectant la polarité – une erreur peut endommager la carte de programmation – donc soyez très attentif.
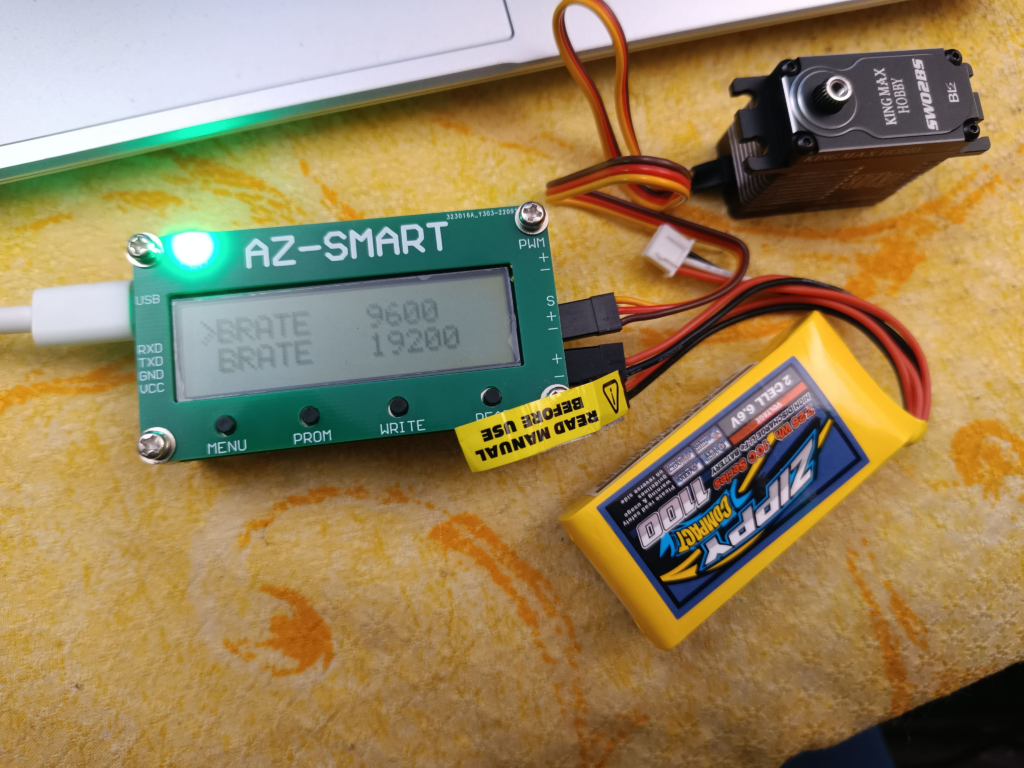
C – Mode d’emploi
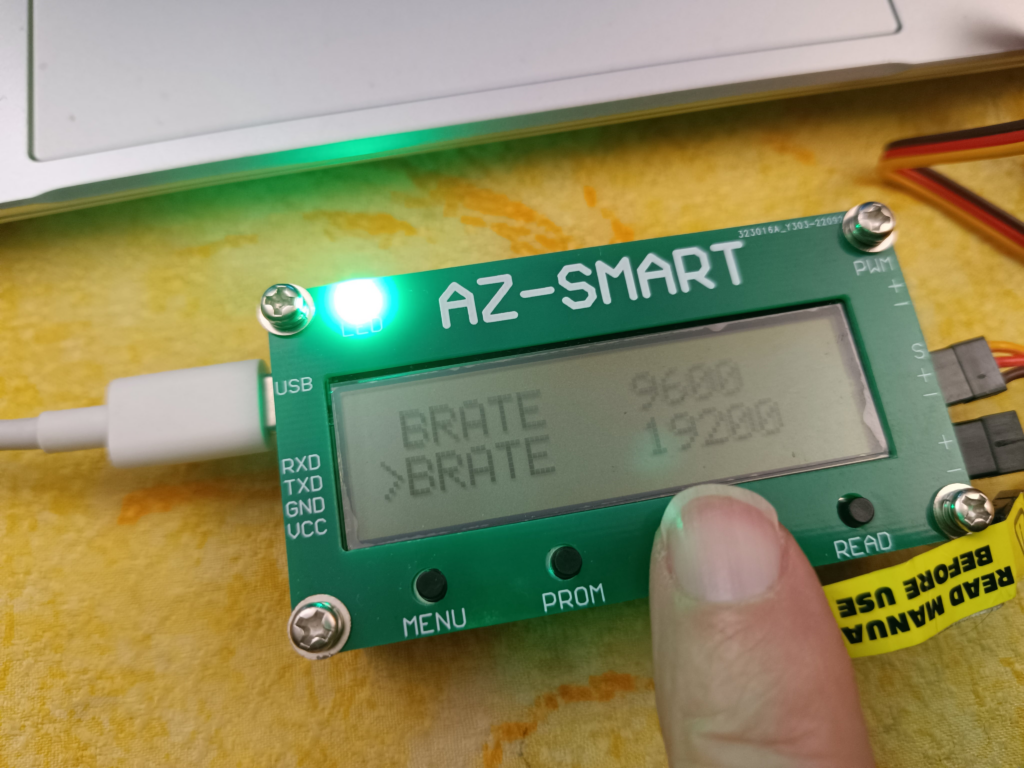
A l’initialisation, l’écran lcd de la carte de programmation affiche la version de la carte puis propose le choix de la vitesse de transmission des données. Pour certains servos c’est 9600 bauds, pour les treuils de la série SW0xxx c’est 19200 bauds.
Pour choisir il faut presser sur le bouton “Write” pour passer d’un choix à l’autre (9600 versus 19200) et pour selectionner la vitesse imposée par le servo, il faut presser sur le bouton “Read”. Pour revenir en arrière il faut presser sur le bouton “Menu”.
Ceci fait on n’aura plus besoin de manipuler la carte de programmation et ses boutons !
2- Installation du logiciel
Le logiciel de pilotage de la carte de programmation est contenu dans un dossier compressé. Il faut donc le décrompresser avant de pouvoir l’utiliser.
Le logiciel se trouve dans le dossier “release”:
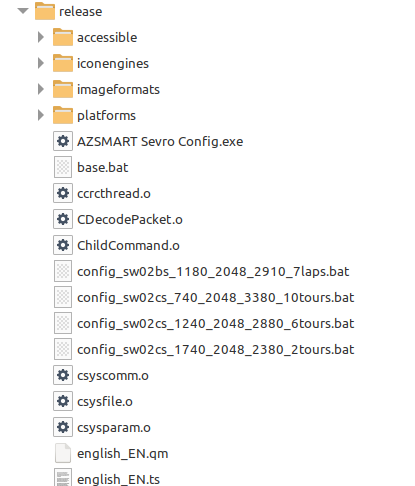
Pour le lancer, il faut double cliquer sur le fichier suivant : AZSMART Sevro Config.exe
Un écran en chinois apparaît, pour le voir en anglais il faut aller sur la seconde ligne et le troisième bouton et sélectionner le second choix.
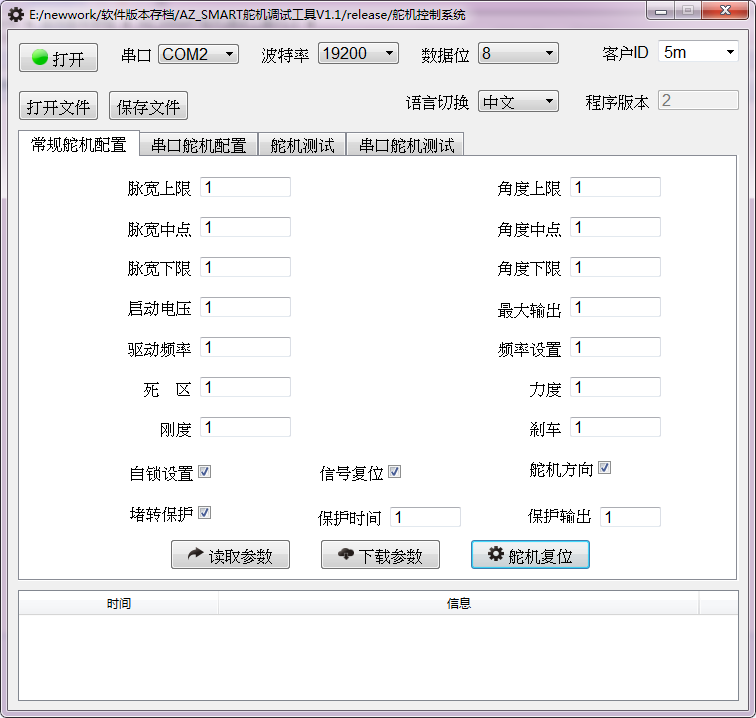
On obtient cette fenêtre. Il faut alors choisir le port série correspondant au branchement (normalement par défaut il est indiqué) et le choix de la vitesse de la communication (ici 19200) qui doit être la même que celle déjà selectionnée sur la carte de programmation.
3 – Connection du port série
Les équipements étant connectés et alimentés, et le logiciel installé et lancé on va pouvoir dialoguer avec le servo.
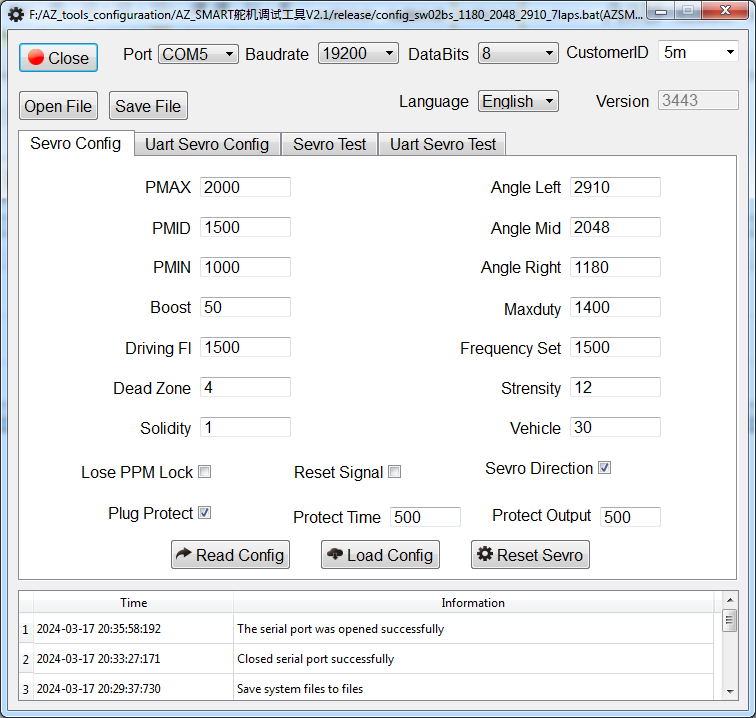
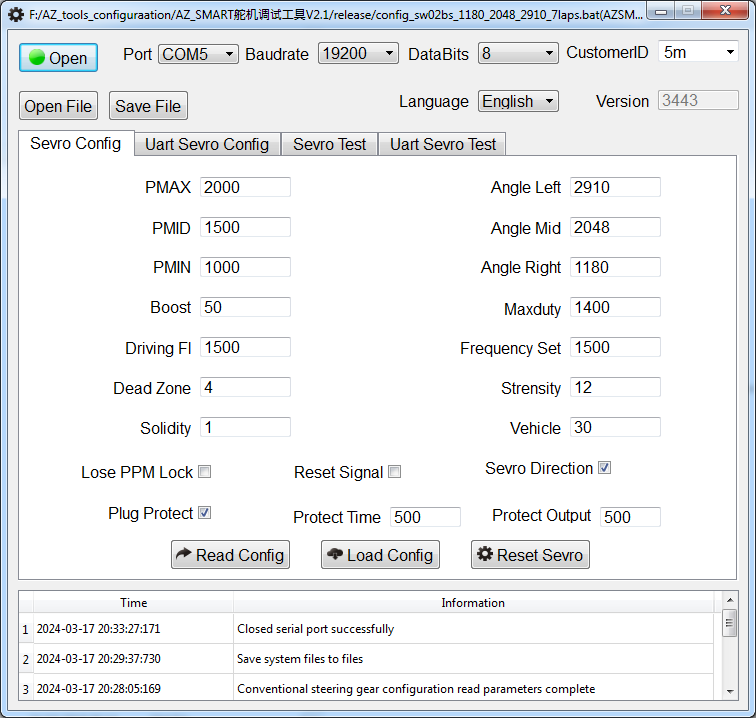
Il faut d’abord établir la connexion en cliquant sur le bouton vert/rouge (Open/Close). Une fenêtre apparaît pour indiquer que la communication est établie.
Pour lire la configuration actuelle du servo il faut la charger en cliquant le bouton “Read Config”, cela va renseigner tous les champs de l’interface.
Un conseil élémentaire est de sauvegarder cette configuration en cliquant sur le bouton “Save File” ; choisir un nom de fichier par exemple SWO2BS_config_initiale.
Vous pouvez désormais modifier les paramètres en vous basant sur la table ci-dessous qui indiquent les valeurs basses et hautes de chaque paramètre.
Cliquez ensuite sur le bouton “Load Config” pour charger les paramètres dans le servo. Celà peut prendre quelques secondes. La led de la carte de programmation passe du vert au rouge pendant le transfert des données.
Le servo va appliquer la nouvelle configuration quand il sera à nouveau alimenté (débranchez et rebranchez le servo).
Sur la figure ci-dessus, la configuration du servo SW02BS a été lue. Les valeurs des angles correspondent à un réglage de 7 tours : 2910/2048/1180
Pour 2 tours les valeurs suivantes pour les Angle Left, Angle Middle et Angle Right sont : 2340/2048/1760
En bidouillant les valeurs des “Angle Left” et “Angle Right” on peut régler le servo exactement au nombre de tours souhaités.
Attention à respecter les règles suivantes :
La valeur haute doit être supérieure à la valeur moyenne et que la valeur moyenne doit être supérieure à la valeur basse.
Les valeurs vont de 100 à 4000.
Bien entendu de nombreux autres paramètres peuvent ainsi etre modifiés – la table ci-dessous indique lesquels et les valeurs basses et hautes permises.
Pour terminer l’opération, je conseille de sauvegarder la nouvelle configuration, puis il faut se déconnecter en cliquant sur le bouton vert/rouge (Open/Close).
Interval des paramètres
| Parameter Description | AZ_2xx products (parameter range) | AZ_5xx products (parameter range) | AZ_6xx products (parameter range) | |
| Can parameters be read? | Can the parameters be read from the servo to the interface? | Cannot read parameters | Can read parameters | Can read parameters |
| Communication baud rate | Communication baud rate between servo and interface | 9600 | 9600 (19200 can be specially customized) | 9600 |
| Upper limit of pulse width | upper limit of input signal | 500-2500 | 500-2500 | 500-2500 |
| pulse width midpoint | midpoint of input signal | 500-2500 | 500-2500 | 500-2500 |
| Pulse width lower limit | Lower limit of input signal | 500-2500 | 500-2500 | 500-2500 |
| Angle upper limit | Angular position of signal upper limit | 100-4000 | 100-4000 | 100-4000 |
| Angle midpoint | Angular position of signal midpoint | 100-4000 | 100-4000 | 100-4000 |
| Angle lower limit | Angular position of signal lower limit | 100-4000 | 100-4000 | 100-4000 |
| Starting voltage | Minimum output value of servo | 0-200 | 0-200 | 0-200 |
| maximum output | The maximum output of the servo is used to limit the maximum current or maximum output torque. | 0–1020 | 0–1500 | 0–1498 |
| Drive frequency | steering gear | 1–1568OHZ 2–7840HZ 3–3920HZ 4–1960HZ 5-980HZ 6–490HZ 7–245HZ | 1500(not moving) | 1498(not moving) |
| Frequency setting | Servo output frequency setting | 1 (invalid and immovable) | 1500–16KHZ 3000–8KHZ 6000–4KHZ 12000–2KHZ 24000–1KHZ | 300–300HZ 1000–1KHZ 2000–2KHZ 4000–4KHZ 8000–8KHZ 16000–16KHZ |
| dead zone | No interval output | 1-100(2–2US 3–3US) | 1-100(2–2US 3–3US) | 1-100(2–2US 3–3US) |
| intensity | Steering gear strength affects rudder lock, centering, sensitivity, and jitter. | 1–30 | 1–30 | 1–30 |
| stiffness | influence, smoothness | 1–5 | 1–5 | 1–5 |
| brake | Deceleration effect, affecting overshoot and jitter | 1–200 | 1–200 | 1–200 |
| Self-locking settings | Whether to lock the rudder when the signal is lost | Check to be effective | Check to be effective | Check to be effective |
| signal reset | first signal slow action | Check to be effective | Check to be effective | Check to be effective |
| Steering gear direction | Change the direction of steering gear operation | Check to be effective | Check to be effective | Check to be effective |
| Stall protection | Is the steering gear protected after stalling? | Check to be effective | Check to be effective | Check to be effective |
| protection time | How long does it take to protect the servo after it is blocked? | 10-2000 | 10-2000(100-1.5S) | 10-2000(100-1.5S) |
| Protect output | What is the output of the servo after stall protection? | 0–Maximum output | 0–Maximum output | 0–Maximum output |